- 27 мая 2020
Светодиодные контроллеры и устройства управления для матричных фар
В современных матричных фарах автомобилей часто используются светодиодные линейки и матрицы, для управления которыми требуется все большее число интегральных схем. Обычно в новых моделях больше электроники, которая при этом занимает меньше пространства, чем в предыдущих поколениях устройств (рис. 1).

Рис. 1. Автомобильная светодиодная фара
Для сокращения сроков выхода на рынок и обеспечения эффективного расходования ресурсов крайне важно, чтобы светодиодные модули, рассчитанные для получения заданного светового распределения сложной формы, могли быть легко перенастроены для нового распределения.
Ясно, что ограниченность пространства предполагает большую интеграцию элементов светодиодного контроллера, а перенастройка, необходимая для более быстрого выхода на рынок, обусловливает наличие обмена данными с интегральной схемой светодиодного контроллера.
В этой статье мы покажем, как раз-местить больше функциональности в меньшем пространстве печатной платы, добавив гибкость автомобиль-ному матричному освещению.
ТИПИЧНОЕ ВЫСОКОИНТЕГРИРОВАННОЕ РЕШЕНИЕ
Хорошим первым шагом в направлении возрастающей интеграции является объединение двух контроллеров в одну микросхему. На рисунке 2 показана типичная двух-канальная схема автомобильного освещения, в которой предусмотрено асинхронное выпрямление. К сожалению, в сильноточных драйверах применение асинхронного выпрямителя и выбор р‑канальных транзисторов и диодов Шоттки приводит к низкому КПД.
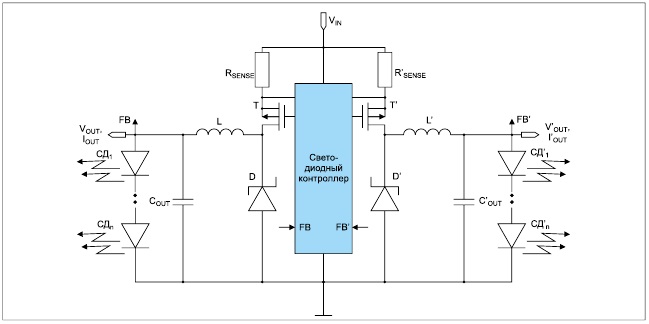
Рис. 2. Типичная схема асинхронного выпрямления со сдвоенным контроллером
В стремлении устранить отдельные причины низкой эффективности делались попытки использования в верхнем плече n‑канальных транзисторов вместо p‑канальных. Однако это решение требует огромных n‑канальных МОП‑транзисторов для компенсации потерь на диодах Шоттки в нижнем плече. Кроме того, сдвоенный контроллер часто размещается в крупном корпусе TSSOP, что еще больше увеличивает занимаемую площадь. На рисунке 3 показан типичный n‑канальный асинхронный выпрямитель, занимающий 264 мм2 поверхности платы.
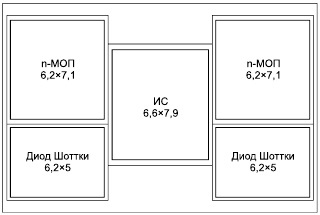
Рис. 3. Площадь схемы асинхронного выпрямления (264 мм2)
ПРЕИМУЩЕСТВО СИНХРОННОГО ВЫПРЯМЛЕНИЯ
Например, для входа 48 В и выхода 12 В понижающий преобразователь работает с коэффициентом заполнения около 25%. Это означает, что транзистор верхнего плеча (T на рис. 2) открыт только 25% времени. Внешний выпрямительный диод (D) открыт оставшиеся 75% времени, что обусловливает больший вклад в рассеиваемую мощность. С другой стороны, если мы используем синхронную архитектуру, то диод заменяется МОП‑транзистором нижнего плеча, действующим как синхронный выпрямитель. Таким образом, высокое падение на диоде мы заменяем низким падением на сопротивлении открытого МОП‑транзистора RDS(ON). При полной нагрузке резистивные потери мощности на МОП‑транзисторах могут быть на порядок меньше, чем потери на диодах Шоттки! Очевидно, что логичный способ минимизации рассеяния мощности – это использование схемы синхронного выпрямления.
СИНХРОННЫЙ МОЩНЫЙ ДВУХКАНАЛЬНЫЙ ПОНИЖАЮЩИЙ СВЕТОДИОДНЫЙ ДРАЙВЕР
Синхронный, полностью n-канальный, понижающий светодиодный контроллер с последовательным периферийным интерфейсом SPI (рис. 4) объединяет два канала на одной микросхеме, что уменьшает занимаемую площадь и сокращает перечень необходимых компонентов. Два не совпадающих по фазе канала сглаживают входной ток, распределяя его энергию, снижая среднеквадратичный ток и эмиссию ЭМП. При более низком среднеквадратичном токе можно использовать меньшие и менее дорогие входные конденсаторы. Установка высокой, хорошо контролируемой частоты переключения (вне диапазона частот AM) уменьшает радиочастотные помехи и обеспечивает выполнение стандартов ЭМС. Быстрая переходная характеристика предотвращает флуктуации выходного напряжения и тока, вызванные мгновенным изменением длины светодиодной цепочки. Это устройство идеально для матричного освещения и модулей светодиодных драйверов.
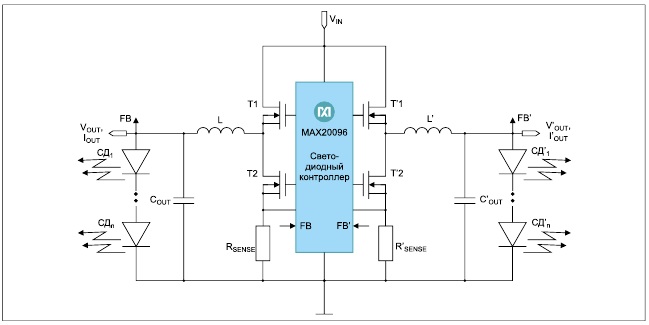
Рис. 4. Синхронный мощный двухканальный понижающий светодиодный контроллер
Применение современного технологического процесса позволяет помещать все функции сдвоенного контроллера в небольшой корпус. Исключение из схемы диода Шоттки значительно снижает потери мощности в сильноточных системах, позволяя использовать дискретные МОП‑транзисторы меньшего размера (рис. 5).
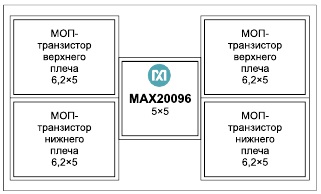
Рис. 5. Площадь схемы синхронного выпрямления (149 мм2)
При синхронном выпрямлении размер занимаемой устройством площади снижается с 264 до 149 мм2, то есть на 43%. Дальнейшая интеграция систем может быть реализована с помощью двух МОП‑транзисторов верхнего и нижнего плеча, интегрированных в один корпус.
ВЫСОКАЯ ЭФФЕКТИВНОСТЬ
На рисунке 6 показана эффективность работы светодиодного драйвера. Два синхронных выпрямительных МОП‑транзистора (верхний 107 мОм, нижний 58 мОм) в небольшом корпусе LFPACK56 обеспечивают высокий КПД в широком диапазоне токов нагрузки.
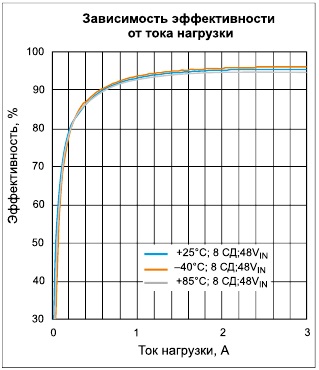
Рис. 6. Зависимость эффективности светодиодных драйверов от тока нагрузки
ПОСЛЕДОВАТЕЛЬНЫЙ ПЕРИФЕРИЙНЫЙ ИНТЕРФЕЙС (SPI)
Интерфейс SPI (только MAX20096) поддерживает гибкость и многократное использование светодиодного модуля, поскольку он совместим со стандартными микроконтроллерами различных производителей. Через SPI может осуществляться управление диммированием светодиодных светильников, а также считывание данные об отказах, получение величины выходного тока/напряжения на обоих каналах и температуры полупроводникового кристалла. В отказоустойчивом режиме (если связь SPI прервана) устройство может продолжить работу в аналоговом режиме.
12-КАНАЛЬНЫЙ КОНТРОЛЛЕР
Устройство управления матрицей с 12 ключами (рис. 7) можно реализовать с помощью MAX20092. Эта микросхема снабжена последовательным периферийным интерфейсом. MAX20092 – это ведомое (slave) устройство, использующее интерфейс SPI для связи с внешним микроконтроллером, который выполняет роль ведущего (master). Каждый из 12 ключей можно запрограммировать независимо для отключения любого светодиода в последовательной цепи. Каждый ключ может быть полностью включен, выключен или диммирован с помощью режима плавного перехода или без него. Частота ШИМ устанавливается внутренним генератором или внешним источником тактовой частоты. Микросхема имеет защиту от обрыва светодиодов, а также передает данные об обрывах и коротких замыканиях светодиодов посредством SPI. MAX20092 выпускается в 32‑контактном (5Ч5 мм) корпусе TQFN (SWTQFN) со смачиваемыми фланцами выводов и специальным тепловым контактом.
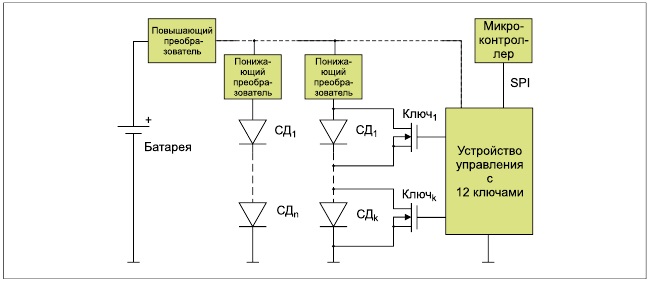
Рис. 7. Схема светодиодного драйвера с устройством управления матрицей с 12 ключами
Повышающий преобразователь, изображенный на рисунке 7, можно реализовать с помощью автомобильных повышающих SEPIC‑контроллеров MAX16990/MAX16992 36 В, 2,5 МГц.
Итак, мы показали, как разместить больше функциональности на меньшей площади поверхности печатной платы, одновременно добавив гибкость для следующего поколения светодиодных контроллеров, предназначенных для автомобильного матричного освещения. Синхронный n‑канальный понижающий светодиодный контроллер MAX20096 объединяет два не совпадающих по фазе канала в одной микросхеме, уменьшая занимаемое пространство на печатной плате и сокращая количество необходимых компонентов. Благодаря интерфейсу SPI он также обеспечивает более высокую гибкость и многократное использование. Более простой контроллер MAX20097 предназначен для систем, не требующих обмена данными по интерфейсу SPI. С помощью MAX20092 можно независимо управлять свечением каждого из 12 светодиодов, соединенных в одну цепочку.
Автор:Назарено (Рено) Россетти, Maxim Integrated
Опубликовано в журнале "Современная светотехника", №2, 2020